基于旋量理论的 Franka 机械臂逆运动学求解器 GeoFIK 研究

专属客服号

微信订阅号
大数据治理
全面提升数据价值
赋能业务提质增效

Franka Research 3机械臂是机器人研究领域应用广泛的 7 自由度冗余操作臂,在学术研究、工业实验与人机协作场景中使用频次较高。该机械臂通过腕部与肘部连杆偏置设计,降低末端有效质量、提升交互安全性,但也带来了复杂的运动学特性。
结构特性
7 自由度冗余构型,存在一维自运动流形,理论上有无穷多组逆运动学解
腕部、肘部非球形对称,传统解析法依赖的几何条件不成立
关节限位与连杆干涉约束严格,有效解范围有限
现有求解器局限
多数方法仅锁定关节 q7 作为自由变量,构型探索空间受限
代数解法缺少几何直观,奇异性位形下易失效
数值解法速度较慢,难以满足实时控制需求
部分求解器存在错误解、超限解,实体部署稳定性不足
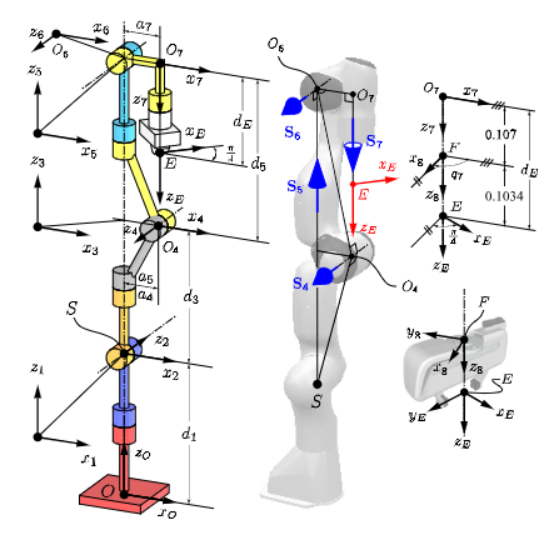
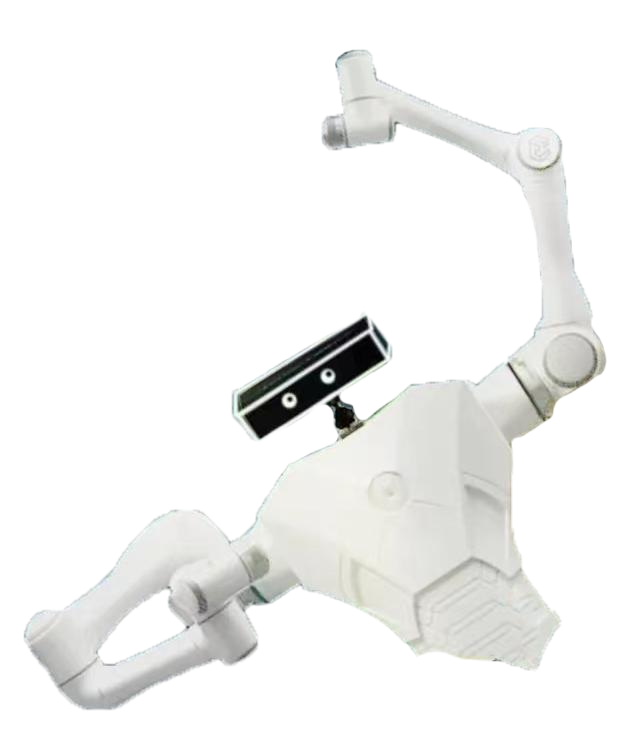
图1:Franka 机械臂在各关节角 qi=0(i=1,…,7) 时的初始构型,以及末端执行器坐标系的细节。注:坐标系 8 与坐标系 E 均刚性固连在夹持器上。
BFT为用户提供高效的解决方案
如有产品购买需求请联系:18551727852
针对上述挑战,Lopez-Custodio等人提出了名为 GeoFIK(Geometric Franka IK)的新型分析求解器 。
基于螺旋理论(Screw Theory):与依赖纯代数公式的传统解算器不同,GeoFIK利用螺旋理论从几何角度描述机械臂 。它先确定机械臂的螺旋轴,然后再系统地计算关节角度 。
多参数冗余解析:GeoFIK不仅支持锁定关节$q_7$,还允许开发者锁定$q_4$、$q_6$或使用“摆动角”(Swivel-angle)来解析冗余 。这种灵活性使得机械臂在复杂的作业空间中能找到更多有效的构型,从而保证任务的连续性 。
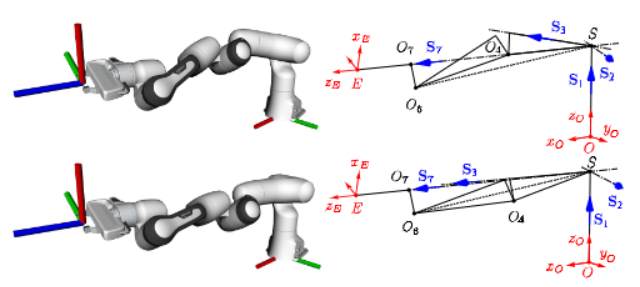
图2:肩轴与 S7 奇异位形下的肘部上位与肘部下位解。
奇异位姿处理:由于采用了螺旋理论,该方案能更直观地识别并处理奇异点(如肩膀持平奇异点等),在其他求解器可能失效的极端位姿下依然能维持解算的可靠性。

图3:平肩奇异位形示例
高效计算:该求解器在计算关节角的同时,可以不增加额外成本地提供雅可比矩阵(Jacobian matrix) 。这对于动态控制和实时路径规划至关重要。
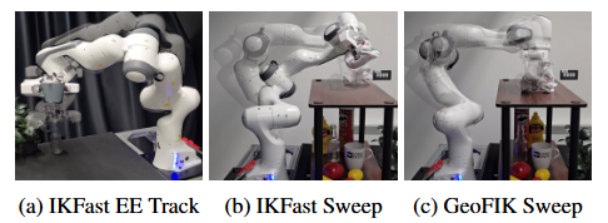
研究将GeoFIK与HeLiu、IKFast、IKGeo三类主流求解器进行对比,覆盖计算效率、解有效性、奇异位形表现与实体部署效果。
计算效率与解质量
关节角求解速度处于较优水平,雅可比矩阵计算速度优势明显
单次调用最多输出8组有效解,无错误解,末端误差较低
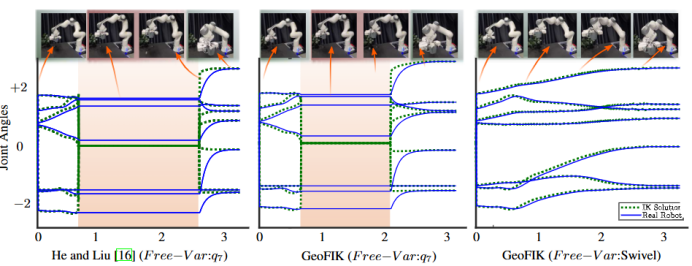
轨迹跟踪实验
如下图 所示,约10秒处,HeLiu 与以q₇为自由变量的GeoFIK均出现求解失效,机器人运动中断
以旋转角为自由变量的GeoFIK全程可找到可行解,关节轨迹平滑连续
清扫等实操任务
如图下图 所示,IKFast 常输出无效解,易引发机械臂急剧转动、姿态翻转等问题
GeoFIK 在轨迹跟踪、清扫任务中均可稳定完成,无异常运动
结语
Franka Research 3作为现代机器人研究的核心工具,其复杂的运动学特性对解算软件提出了很高要求。GeoFIK等新型几何解算器的出现,不仅为Franka提供了更为稳健、快速的逆运动学支持,也通过开源C++代码等形式,进一步促进了机器人学术界在复杂路径规划、人机协作及自动化工业应用方面的探索 。
项目详情:https://arxiv.org/abs/2503.03992
还想了解更多详情?
搜索我们的官网查看更多内幕
https://www.bft-robot.com/index/
点击下方关注BFT机器人
私信客服免费获取
产品信息&产品手册
编辑:春花
BFT机器人平台提供先进产品与机器人自动化技术,助力企业智能化转型升级,为您的企业生产注入发展新动能。BFT将竭诚为您提供机器人技术咨询与方案设计服务,为您提供最具价格优势的产品!


联系电话

联系电话:
18551727852
微信公众号

联系邮箱:
ming@bft-robot.com
往期精彩回顾