小米灵巧手,重磅升级!!!

专属客服号

微信订阅号

温馨提示:扫描文末二维码,加入知识星球,免费下载2700+行业报告(包含海外投行报告);商务和研究咨询合作请联系16620948826(同微信)就在几周前,小米宣布其人形机器人在汽车组装试点项目中取得了 90.2% 的成功率,如今,小米又详细介绍了其硬件的下一步发展,旨在将该指标推向近乎完美的境界。昨天早上,该公司机器人部门在微博上发布技术更新,详细介绍了CyberOne仿生手的全新设计。此次更新着重解决灵巧操作中的三个关键瓶颈:物理尺寸、机械耐久性和散热管理。
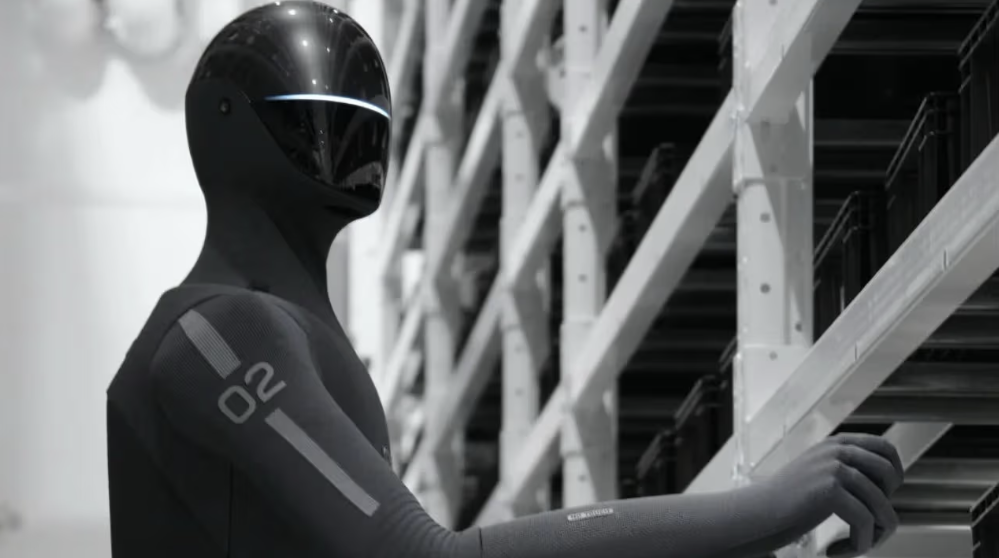
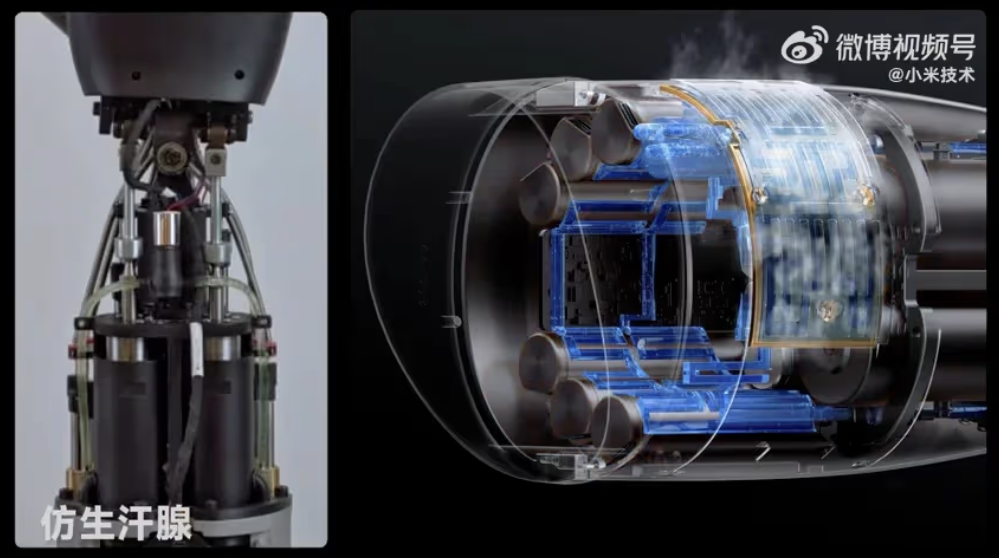
仓库环境中的升级版CyberOne硬件。新款机器人拥有亮黑色面板和覆盖四肢及躯干的深灰色织物外壳,外观与Figure公司的Figure 03机器人颇为相似。为了更好地利用人类远程操作数据,小米将仿生手的体积压缩了约60%,使其尺寸从 228x105x64毫米缩小到高度紧凑的187x88x36 毫米。这实现了与成年人手部平均尺寸 1:1 的比例匹配。尽管尺寸缩小了,但机械结构的复杂性却显著增加。新设计的总自由度 (DOF) 增加了50%,有效自由度更是提升了83%,使机械手的自由度达到了22-27 个,足以模拟真实的人体运动。解决同构问题:通过将体积压缩60%,新型CyberOne仿生手实现了与普通成年人手1:1的比例匹配,确保人类远程操作数据能够准确地转换为机器人的硬件。小米通过匹配人手的形状和范围,旨在最大限度地减少“同构问题”——这种物理差异在将人类动作转换为机器人动作时,往往会降低远程操作数据的质量。触觉手套与数据管道。如果没有强大的触觉反馈,高自由度的手部功能将形同虚设。为此,小米将手部的“全掌”触觉传感器覆盖范围扩大到了8200平方毫米。为了训练这只手,小米采用了由人类操作员佩戴的传感器触觉手套。这使得系统能够捕捉到高保真度的全掌交互数据——包括指尖、指腹和整个手掌。这些数据直接输入到小米的双模型软件栈中,该软件栈包含视觉-语言-动作模型 Xiaomi-Robotics-0和专注于触觉的TacRefineNet。通过采用基于手套的方法,研究人员可以快速收集大量的操作数据集,同时避免传统远程操作中众所周知的缓慢低效的过程。数据采集实战:一个远程操控的人形机器人正在操作汽车铸件和软管。小米使用触觉手套来采集高保真交互数据,用于其双模软件栈。如何在工厂车间生存。在实际工业环境中,机械手面临着巨大的物理压力。小米指出,早期高度复杂的机械手在不到1万次循环后就经常发生灾难性故障,例如肌腱断裂、弹簧损坏或外壳破损。经过一年反复的设计、模拟和测试,这款新型机械手据称已突破了耐久性方面的重大突破。该公司发布的未经剪辑但加速2000倍的视频显示,该硬件在超过15万次连续抓取循环后仍未出现故障,这标志着其向量产级可靠性迈出了关键一步。“仿生汗腺”。这款新型机械手最创新的工程解决方案或许在于其热力学特性。将超过20个电机集成到一只人形机械手内,会导致严重的局部过热。小米估计,一只执行重载任务的机械手耗电量超过100瓦;即使效率达到70%,超过30瓦的功率也会直接转化为热量。在“停滞”状态下——即机械手持续施力但未移动——这种热负荷会限制其连续运行时间。应对高温:小米设计了一套仿照人体汗腺的主动散热系统。这套3D打印的液冷通道利用蒸发冷却原理带走热量,显著延长了工厂重载作业的连续运行时间。为了解决这个问题,小米设计了一套仿照人体汗腺的主动冷却系统。前臂内置金属3D打印液冷通道。微型泵将电机产生的热量输送到蒸发区。该系统每分钟仅蒸发0.5毫升水,即可带走约10瓦的热量,显著延长机器人保持高抓握力的时间。随着雷军力推五年内大规模部署,要将成功率从90%提升到99.9%的可靠性,硬件必须能够经受住连续生产线严苛环境的考验。小米最新推出的这款“机械手”配备了仿生汗腺,并拥有15万次的循环寿命,充分展现了该公司如何应对工厂车间的高温环境。这家总部位于北京的公司于2022年8月首次发布了其通用人形机器人CyberOne。然而,在发布会之后,小米对其人形机器人项目几乎完全保持沉默。免责声明
1、我们整理、翻译和转载此文出于传播更多资讯之目的,不代表本号观点,亦不构成任何投资观点,由此做出的投资决策与本人本文无关!2、本文所用的视频、图片、文字如涉及作品版权问题,请第一时间联系小编:16620948826(同微信),我们将立即删除,无任何商业用途!
# 扫描上方二维码,添加小编微信 #
# 申请请备注公司+姓名+职位
转载说明:本文系转载内容,版权归原作者及原出处所有。转载目的在于传递更多行业信息,文章观点仅代表原作者本人,与本平台立场无关。若涉及作品版权问题,请原作者或相关权利人及时与本平台联系,我们将在第一时间核实后移除相关内容。
产业数据库
产业链 200+
产业环节 10000+
产业数据 100亿+